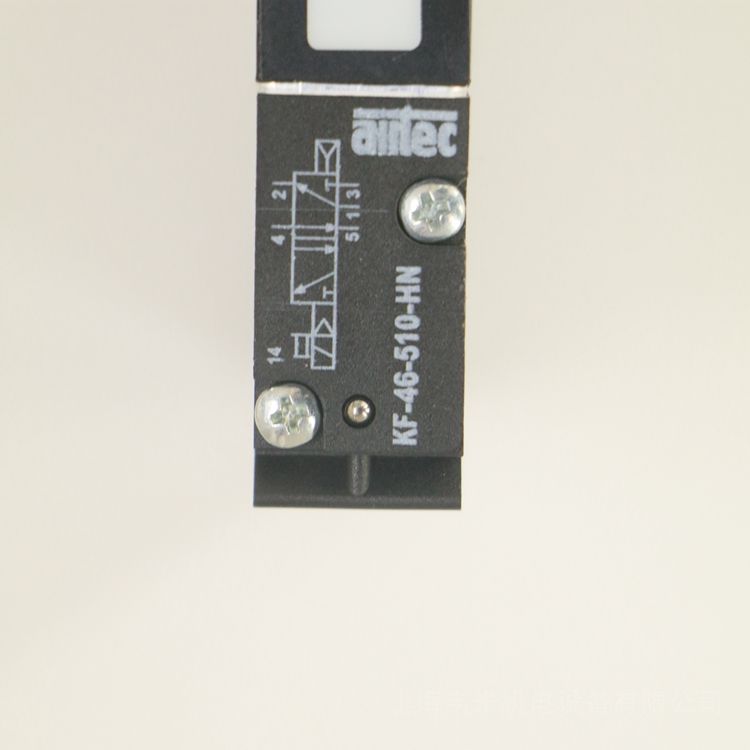
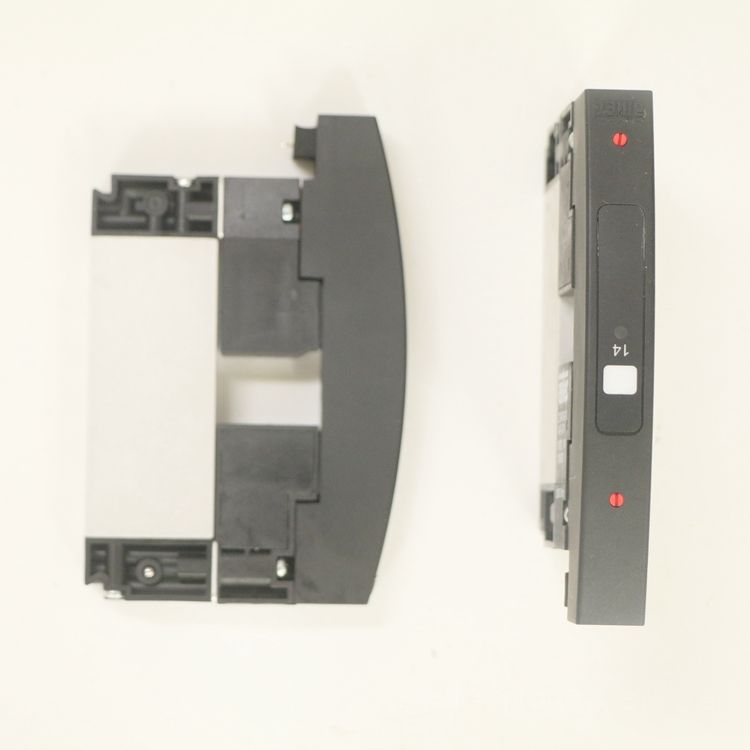
AIRTEC늴��yKF-46-510-HN-S12ُ�I�M��Һ������ӡ��Ԅӻ����ƹ��I������J��“�Ϻ��f�יC��O������˾”���aƷ�DƬ�����Ĕz�����Cԭ�b�aƷ��Ʒ�|���ϣ��ۺ�o�n���������ۣ��r�ݣ����îaƷ�F؛�������gӭ���Ͽ͑���ԃ��ُ��
�y�u����һ�����һ�w������Ԫ�������яij�����ᘽӿڵ��y�u�lչ�鎧�F���������y�u���^�����F�ɾ����y�u��ģ�Kʽ�y�u���y�u���g�ͬF���������g��Y�ϣ����H�_���� 늿��y�IJ������ף�����Ҳ���غ����ˏ��sϵ�y���{ԇ�����ܵęz�y���\�༰�S�o�����������F��������ˮƽһ�w������Ϣϵ�y��ʹ���ߵă��ݵõ���ְl�]�����ЏV���đ���ǰ��������y�u�V���������Ԅӻ��I���У�����܇���졢���z��������ӡˢ���b��������ʳƷ���I��
ģ�Kʽ�y�u
���y�u�OӋ��������ģ�K�����OӋ˼�룬�@��y�u�Ļ����Y���ǣ�
l������ģ�Kλ���y�u���롣����ģ�K�����N������ʽ����ᘽӿ��͡��F�������ͺͿɾ����͡�
2�����N�ߴ硢���ܵ�늴��yλ���y�u�҂ȣ�ÿ2����1���y�b�ڎ��нyһ��·���·�ӿڵ��y���ϡ��y���Ĵ���������ɴ_�����䂀��Ҳ�������p��
3�����N���̖��ݔ��/ݔ��ģ�Kλ���y�u��ȣ��ṩ���������̖ݔ��/ݔ��ģ�K�aƷ��
�Ў���������������ᘲ��^����ASI�ӿڼ����F�������ӿڵ��y�u��
�������������y�uͨ���ԏ������������o����Ҫ��������|���ИO�����e���ܣ��������ώ��� LED�ͱ��o�·���քe�����@ʾ�y�Ĺ�����B�ͷ�ֹ�^����
����ᘲ��^���y�uͨ�^�����|��������̖�Ŀ�������ݔ���y�u����w�ϲ��H��늚��ᘲ��^������߀����LED�@ʾ���ͱ��o�·��
��ASI�ӿڵ��y�u�����@����һ�����c�ǔ�����̖���Դ늉���ͬһ��2о��|ͬ�r��ݔ����|���Π�ʹ�Ñ�ʹ�Õr�ų��˘O���e�`������ASI�ӿ�ϵ�y��ÿ��ģ�Kͨ���ṩ4����ַ�����һ��ASI�y�u�ɰ��b4����λ��ͨ�ο��y��2����λ��ͨ�p���y��
���F�������ӿڵ��y�u���c�F���������c����������B���@Щ�O�䌢��ɢ��ݔ��/ݔ����Ԫ��������������B��4����֧��ÿ����֧�ɰ���16��ݔ���16��ݔ�����B����|ͬ�rݔ�Դ�Ϳ�����̖��Ҳ�����f�����m�Ͽ��Ʒ�ɢԪ����ʹ�y�M���ܰ��b�ښ��������Ŀ���ǿs�̚���L�ȣ��pС�M�Ś�r�g�����p�������pʧ��
늴��y��Ȧͨ늣��a���ň����y�w�ȵ�ͨ�����_��ʹ���w����ͨ�^����늺�ň���ʧ�����wͨ���P�]��늴��y������ͨ��С�ͿՉ��C����ã��ϣ����Á��o�Չ��C�C�^й���ġ��Չ��Cֹͣ��B�r����׳����DZ�늴��y��ͨ�ⲿ�Á�й�Ś≺�ģ����C�Չ��C���ӕr��׳��ډ������㣬��׳�������Љ����������\�Е��ܳ����ģ���������늄әC�y�Ԇ��Ӷ��^�d���Չ��C���ӕr늴��y���P�]й����ʹ���s�՚⽛�^�����y�����ޡ�ͨ����С�ͿՉ��C���䱾���ĉ��������_�P���Ȳ���һ��СС�ķŚ��b�ã��B�ӵ��˚�׳��ڹ��ϡ�
���늴��y�������ܺ���Ҫ�����S��ͨ��λ���Ѓ�λ��ͨ����λ��ͨ����λ��ͨ����λ��ͨ��늴��y������λ��ͨ����λ��ͨ�ַֆ�늿غ��p늿ɷN����
����λ��ͨ����λ��ͨ���У��з���λ��ͨ늴��y���Љ���λ��ͨ늴��y����й��λ��ͨ늴��y���Լ���λ��ͨ늴��y ��߀�������������λ��ͨ늴��y������늴��^���ȵȡ�
��Ȼ�����γ��õ��ǃ�λ��ͨ늴��y����λ��ͨ늴��y�������Ҫ��ף������������gֹͣ�r��������λ��ͨ늴��y��
AIRTEC�۠�̩���y�u
RE-46/04-G-M-1
RE-46/06-G-M-1
RE-46/08-G-M-1
RE-46/10-G-M-1
RE-46/12-G-M-1
RE-46/14-G-M-1
RE-46/16-G-M-1
RE-46/18-G-M-1
RE-46/20-G-M-1
RE-46/22-G-M-1
RE-46/24-G-M-1
RE-46/04-G-AS3
RE-46/08-G-AS3
RE-46/12-G-AS3
AIRTEC�۠�̩��2x��λ��ͨ�Q���y
KF-46-210/2-HN-S12
KF-46-310/2-HN-S12
KF-46-312/2-HN-S12
KF-46-314/2-HN-S12
AIRTEC�۠�̩�˶�λ��ͨ�Q���y
KF-46-510-HN
KF-46-510-HN-S12
KF-46-511-HN-S12
KF-46-520-HN-S12
AIRTEC�۠�̩����λ��ͨ�Q���y
KF-46-530-HN-S12
KF-46-533-HN-S12
KF-46-534-HN-S12
AIRTEC�۠�̩���y�u���
RE-19-DT
RE-26-DS
RE-46-B-01
RE-46-B-02
RE-46-DS
RE-46-RSV
RE-16-V-EP
RE-46-V-EP
21-KF-46-01
28-ST-46-M1-25-105
28-ST-46-M1-25-110
28-ST-46-M1-44-105
28-ST-46-M1-44-110
28-ST-RE-46-01-B1
28-ST-RE-46-02-B1
28-ST-RE-46-01-B6
28-ST-RE-46-02-B6
54-RE-46-D
54-RE-46-E
54-RE-46-FR
54-RE-46-D-CAN
�Ԅӻ������а��Ԅ��cȫ�Ԅӻ����Ԅӻ�������һ�N�F�����I���r�I������I�����a�I���ЙCе늚�һ�w�Ԅӻ����ɿ��Ƽ��g����Փ
�Ԅӻ������а��Ԅ��cȫ�Ԅӻ������磺�C�����O����������a��Ҫ���Ŀ�ģ��M���Ԅӻ����a��ȫ�Ԅ���ֻ��Ҫ��������T���_�����Ƶ�Ҫ��ͳ�����ֱ�Ӆ��c���a�^�̵Ŀ��Ƽ��g�����Ԅӻ�����Ҫ��ͨ�^�Oʩ���O�䡢�Cе���x�����ֹ��Ȅڄ����ą��c��
�^���Ԅӻ�
ʯ�͟��ƺͻ����ȹ��I�����w����w�Ļ��W̎�����Ԅӻ����ơ�һ������əz�y�x�����{������Ӌ��C�ȽM�ɵ��^�̿���ϵ�y�����ӟ�t�����s�����O����������S�M�Ѓ����ơ����õ���Ҫ���Ʒ�ʽ�з������ơ�ǰ�����ƺ̓����Ƶȡ�
�Cе�����Ԅӻ�
�@�ǙCе����늚⻯�c�Ԅӿ�����Y�ϵĽY����̎���Č������xɢ���������ڵęCе�����Ԅӻ��Dz��ÙCе��늚ⲿ���ĆΙC�Ԅӻ����Ǻ��ε��Ԅ����a�����������Ӌ��C�đ��ã����F�˔��ؙC�����ӹ����ġ��C���ˡ�Ӌ��C�o���OӋ��Ӌ��C�o�����졢�Ԅӻ��}��ȡ����Ƴ��m����Ʒ�N��С�������a��ʽ����������ϵ�y��FMS��������������ϵ�y����A���Ԅӻ�܇�g��������Ϣ���������a�����Ԅӻ������F�˲���Ӌ��C��������ϵ�y��CIMS���Ĺ��S�Ԅӻ�����ϵ�y��
�Ԅӿ������Ԅ��{�����z�y���ӹ��ęC���O�䡢�x������Ҏ���ij����ָ���Ԅ��M�����I�ļ��g��ʩ����Ŀ���������Ӯa��������|�������ͳɱ��̈́ڄӏ��ȡ��������a��ȫ�ȡ�
���I�C�����ǏV�����ڹ��I�I��Ķ��P���Cе�ֻ�����ɶȵęC���b�ã�����һ�����Ԅ��ԣ������������Ą�����Դ�Ϳ����������F���N���I�ӹ����칦�ܡ����I�C���˱��V����������ӡ������������ȸ������I�I��֮�С�
һ����f�����I�C����������������ϵ�y�M�ɡ�
�����ǙCе���֡����в��ֺͿ��Ʋ��֡�
������ϵ�y�ɷ֞�Cе�Y��ϵ�y����ϵ�y����֪ϵ�y���C����-�h������ϵ�y���˙C����ϵ�y�Ϳ���ϵ�y��
1.�Cе�Y��ϵ�y
�ęCе�Y�����������I�C���˿��w�Ϸ֞鴮�C���˺Ͳ��C���ˡ����C���˵����c��һ���S���\�ӕ���׃��һ���S������ԭ�c�������C����һ���S�\�ӄt������׃��һ���S������ԭ�c�����ڵĹ��I�C���˶��Dz��ô��C�������C�����x���ƽ�_�Ͷ�ƽ�_ͨ�^���كɂ��������\������B�ӣ��C�����Ѓɂ���ɂ��������ɶȣ����Բ���ʽ�ӵ�һ�N�]�h�C�������C���Ѓɂ����ɲ��֣��քe��������ֱۡ��ֱۻ�Ӆ^��ӿ��g�кܴ��Ӱ푣��������ǹ��ߺ����w���B�Ӳ��֡��c���C��������^�����C���˾��Є��ȴY�����������d�������Ӿ��ȸߡ��\��ؓ��С�ă��c����λ������ϣ����C���˵��������ף�������ʮ�����y�������C���˄t�෴�����������y������s�dz����ס�
2.��ϵ�y
��ϵ�y����Cе�Y��ϵ�y�ṩ�������b�á���������Դ��ͬ����ϵ�y�Ă��ӷ�ʽ�֞�Һ��ʽ���≺ʽ��늚�ʽ�͙Cеʽ4�N�����ڵĹ��I�C���˲���Һ���ӡ�����Һ��ϵ�y����й¶�����͵��ٲ������Ȇ��}�����ҹ��ʆ�Ԫ���غͰ��F��Ŀǰֻ�д������d�C���ˡ����ӹ��C���˺�һЩ���⑪�È���ʹ��Һ���ӵĹ��I�C���ˡ��≺�Ӿ����ٶȿ졢ϵ�y�Y�����Ρ��S���㡢�r��͵ȃ��c�����ǚ≺�b�õĹ��������ͣ�����λ��һ��H���ڹ��I�C����ĩ�ˈ��������ӡ������ץ�����D��͚�����P����ĩ�ˈ������������С�Сؓ�ɵĹ���ץȡ���b�䡣�������Ŀǰʹ�ö��һ�N�ӷ�ʽ�������c���Դȡ�÷��㣬푑��죬��������̖�z�y�����f��̎�����㣬�����Բ��ö�N�`��Ŀ��Ʒ�ʽ����늙Cһ����ò��M늙C���ŷ�늙C��ĿǰҲ�в���ֱ����늙C��������r�^�ߣ�����Ҳ�^����s����늙C����Ĝp����һ������C���p�������[���݆�p�������������X݆�p���������ڲ��C�������д�����ֱ��������ֱ��늙C�ڲ��C�����I���ѽ��õ��ˏV�����á�
3.��֪ϵ�y
�C���˸�֪ϵ�y�љC���˸��N�Ȳ���B��Ϣ�ͭh����Ϣ����̖�D׃��C�����������ߙC����֮�g�܉�����͑��õĔ�������Ϣ��������Ҫ��֪�c����������B���P�ęCе������λ�ơ��ٶȺ����ȣ�ҕ�X��֪���g�ǹ��I�C���˸�֪��һ����Ҫ���档ҕ�X�ŷ�ϵ�y��ҕ�X��Ϣ���鷴����̖�����ڿ����{���C���˵�λ�ú��ˑB���C��ҕ�Xϵ�y߀���|���z�y���R�e������ʳƷ�֒������b�ĸ�������õ��ˏV�����á���֪ϵ�y�ɃȲ�������ģ�K���ⲿ������ģ�K�M�ɣ����܂�������ʹ������˙C���˵ęC���ԡ��m���Ժ����ܻ�ˮƽ��
4. �C����-�h������ϵ�y
�C����-�h������ϵ�y�nj��F�C�����c�ⲿ�h���е��O���ϵ�ͅf�{��ϵ�y���C�����c�ⲿ�O�伯�ɞ�һ�����܆�Ԫ����ӹ������Ԫ�����ӆ�Ԫ���b���Ԫ�ȡ���ȻҲ�����Ƕ��_�C���˼��ɞ�һ��ȥ���Џ��s�΄յĹ��܆�Ԫ��
5.�˙C����ϵ�y
�˙C����ϵ�y�����c�C�����M��ϵ�ͅ��c�C���˿��Ƶ��b�á����磺Ӌ��C�Ę˜ʽK�ˡ�ָ������_����Ϣ�@ʾ�塢Σ�U��̖�����ȡ� [3]
6.����ϵ�y
����ϵ�y���΄��Ǹ����C���˵����Iָ���Լ��Ă���������������̖��֧��C���˵Ĉ��ЙC��ȥ���Ҏ�����\�Ӻ��ܡ�����C���˲��߂���Ϣ�����������t���_�h����ϵ�y���߂���Ϣ�����������t���]�h����ϵ�y����������ԭ���ɷ֞�������ϵ�y���m���Կ���ϵ�y���˹����ܿ���ϵ�y�����������\�ӵ���ʽ�ɷ֞��cλ���ƺ��B�m܉�E���ơ�
�ڹ��I���a�У�������b����һ���������Ĺ�������Ҫ�����Ąڄ����������������b�������e�ʸߣ�Ч�ʵͶ���u�����I�C���˴��档�b��C���˵��аl���Y���˶�N���g������ͨӍ���g���Ԅӿ��ơ���Wԭ������Ӽ��g�ȡ��аl�ˆT�����b�����̣��������m�ij������ھ��w���b�乤�����b��C���˵Ĵ����c�����ǰ��b���ȸߡ��`���Դ����ó̶ȸߡ�����b�乤�����s�����������҂��x���b��C���ˁ��M������������܇���������İ��b��